Agent orchestration
Reliable agent orchestration with human oversight in enterprise workflows.
I build reliable AI systems for the real world.
Currently VP, Head of AI & Product Engineering at Zafin, focused on reliable agent orchestration with human oversight.
Core themes
Reliable agent orchestration with human oversight in enterprise workflows.
Embodied AI experiments with the SO-101 and real-world control loops.
Multi-agent worlds for coordination, escalation, and behavior over time.
VisionOS and AR experiments around 3D interfaces and interaction.
A few projects that show the range of work I do across AI interfaces, robotics, simulation, spatial computing, and product building.
Embodied AI experiments with the SO-101, focused on perception, control loops, and action in the physical world.
See details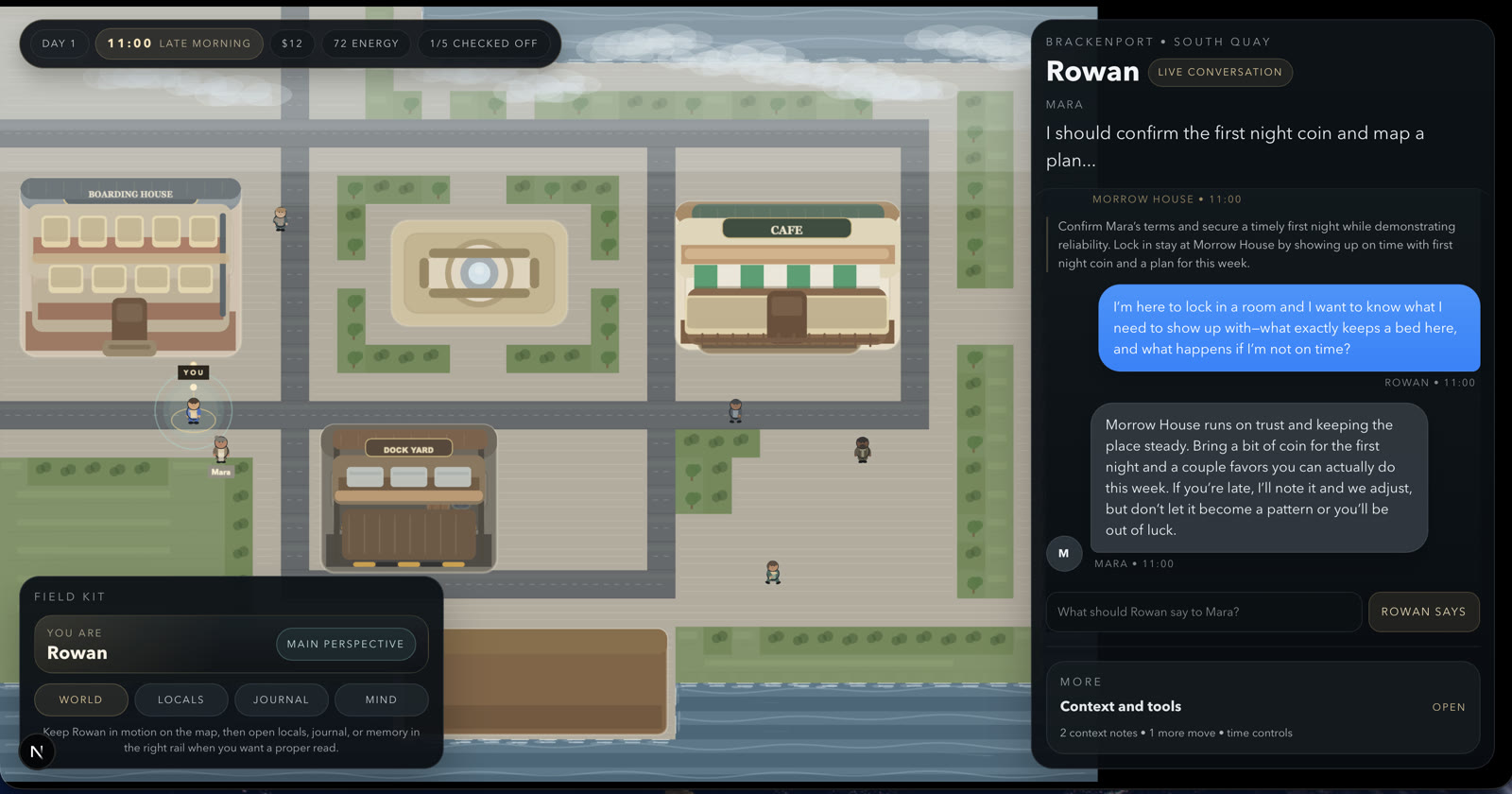
A multi-agent simulation exploring coordination, escalation, and persistent behavior in a shared world.
Also being built through an agent-loop system that reviews gaps, plans next steps, delegates threads, and regression-checks the work.
Spatial computing and AR experiments using VisionOS, SwiftUI, RealityKit, and 3D interfaces.
See details
Built large-scale systems used by millions and received formal technical recognition at IBM.
Includes 2022 Outstanding Technical Achievement Award work.
See details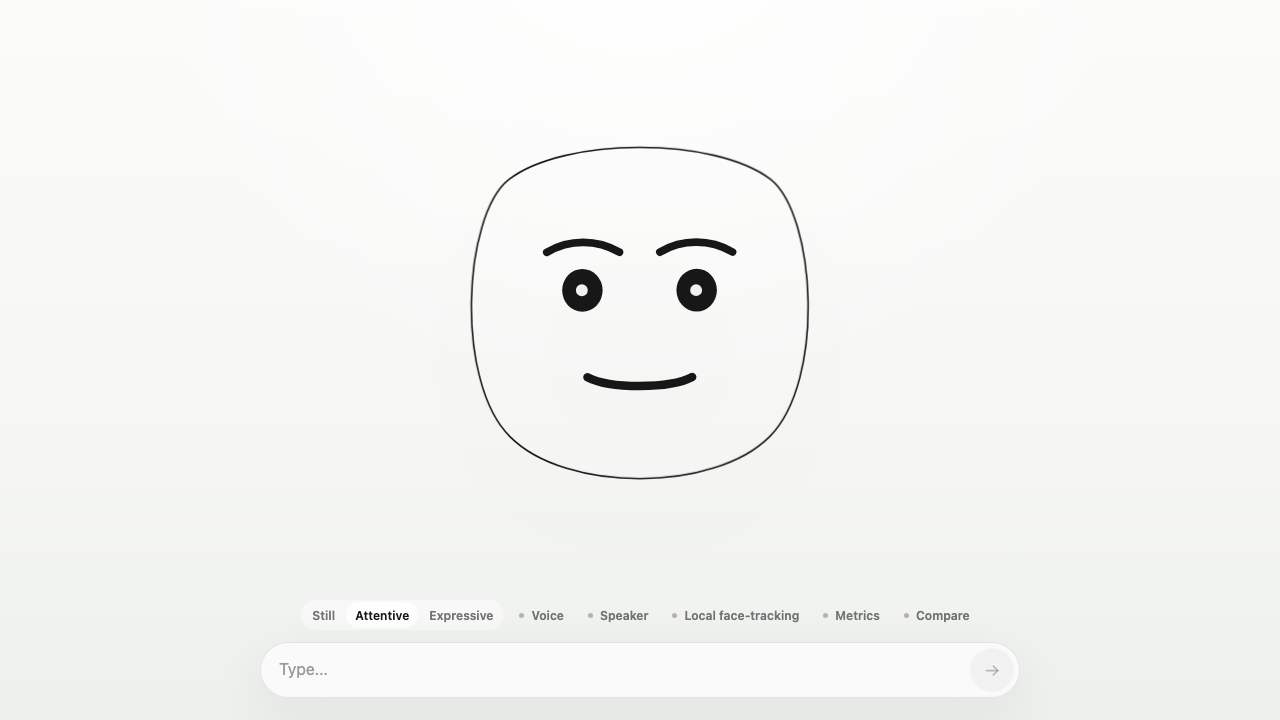
A renderer-agnostic presence runtime for AI interfaces, with a reference face that makes waiting, thinking, streaming, and interruption legible before text appears.
Published as a small package family for AI interface experiments.
See details
A bootstrapped restaurant point-of-sale platform that reached paying customers, exceeded operating costs, and exited through client/data acquisition.
Built and operated from 2015 to 2018.
See detailsRight now I'm working on:
A few things that shape the work I like doing:

More work
Grouped around the four themes above, plus some earlier work.
Current work focused on reliable agent orchestration, human review loops, and production AI workflows in enterprise software.
At Zafin, I lead AI and product engineering with an emphasis on turning model capability into systems that can be trusted in enterprise settings.
The work spans workflow design, review and approval loops, operational controls, and the product engineering required to make agentic systems dependable in production.
A conversation with Tyler Pichach about AI in financial services and enterprise software.
A renderer-agnostic presence runtime for AI interfaces, with React, adapter, and reference-face packages.
AI Presence Kit explores how AI products can show interaction posture while reading, waiting, thinking, streaming, speaking, or recovering from interruption, without pretending to infer private emotion.
The project includes packages for core state, adapters, React bindings, and a reference SVG face proof surface. The package-facing states include idle, user typing, reading, waiting, thinking, streaming, speaking, interrupted, ready, and error.
Presented at Money20/20 on Microsoft’s AI stage, sharing an early roadmap that we later built out and executed.
Built and shipped production AI systems used by more than 20 million people, including work recognized with IBM’s 2022 Outstanding Technical Achievement Award.
Large-scale AI systems work at IBM that had to perform reliably in production, not just in demos.
The award recognized conversational AI orchestration work that combined model capability with the surrounding system behavior needed for real use.
Published IP on transactions between non-trusting parties using auditable networks.
Robotics experiments with the SO-101, including first movement tests and video.
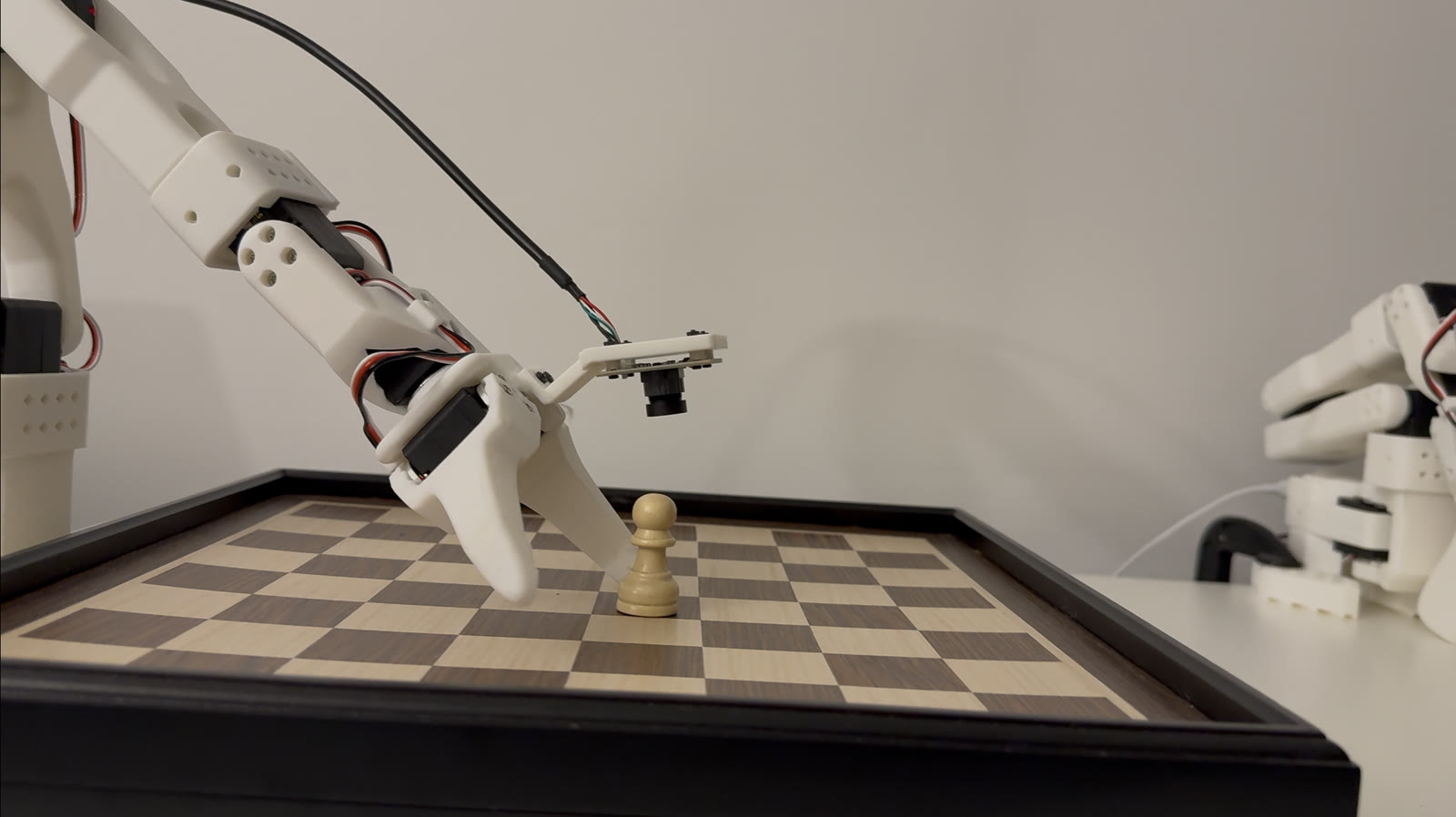
I was testing how well current models can directly control the #LeRobot SO-101 using tool calls, with only one camera mounted on the gripper for world perception and a goal loop (e.g., "pick up pawn" in this case).
— Branavan Selvasingham (@0_branavan_1) December 21, 2025
Takeaway: These models are rapidly approaching embodied AI… pic.twitter.com/AuYLGOFQgn
A hello world of sorts with #LeRobot SO-101. Kinda late to the party because I burned out a motor as soon as I got it earlier 😅. Took some time to get the replacement and get back into it.
— Branavan Selvasingham (@0_branavan_1) September 21, 2025
Really cool tech. Interested to see how much it can do. pic.twitter.com/qwZ5vX5YB1
Built vision-based motion control experiments for robot arms.
Built a system that combined robotic vision and conferencing for remote interaction experiments.
Designed and built a smart locker system for secure storage experiments.
Simulation and agent orchestration prototype for coordinating multiple semi-autonomous actors in a shared world.
Many Lives is a simulation and agent orchestration prototype built around a shared world with multiple semi-autonomous actors. The goal is to move beyond single-agent chat interactions and explore how agents persist over time, accumulate context, surface competing pressures, and continue acting inside a living system.
The project focuses on orchestration through attention, escalation, memory, and policy rather than direct turn-by-turn control. It sits at the intersection of simulation design, agent architecture, and human oversight for systems that need to remain legible while multiple threads stay active at once.
It is also being built through a Codex-based agent-loop workflow: recurring gap and alignment reviews, planning for next steps, thread delegation, and regression checks that feed back into the core repo.
Built simulation environments for Boston Dynamics Spot experiments.
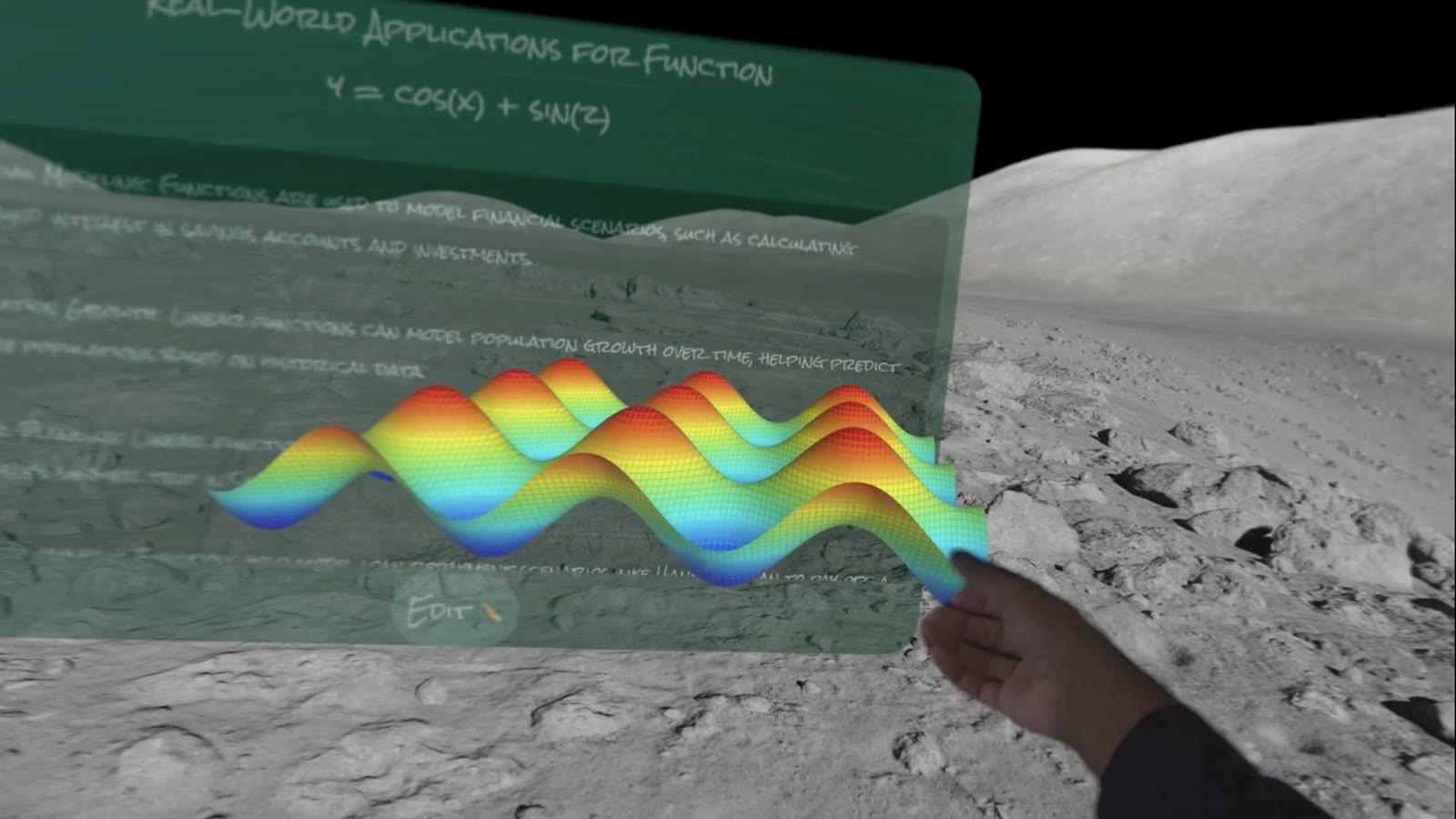
A VisionOS project exploring 3D graphing and spatial interaction.
Graph visualizer: "Shape of μ"
Built a home hub that combined touch, voice, and display in one system.
Understanding the tiny bits (img)
Sound Test with touch-based volume controls (vid)
Custom PCBs made from Shenzhen (img)
Display test on assembled custom PCB (vid)
Another display test on assembled custom PCB (vid)
Full system custom PCB with assembled components (img)
First system PCB batch order from Shenzhen (img)
Designed e-paper labels for retail stores with real-time updates.
Built a projection system for interactive display experiments.
A bootstrapped SaaS platform for small cafes with inventory, streamlined ordering, loyalty, analytics, and support for Canadian tax rules. It reached paying customers, exceeded operating costs, and exited through client and data acquisition.
Built features across inventory management, low-click ordering, Canadian tax support, loyalty programs, analytics, and hardware integrations like wireless printing.
Bootstrapped to paying customers, reached monthly recurring revenue above operating costs, and exited through data and client acquisition by Nown POS.
Built a web app (thegreatmind.org) for analyzing video transcripts and extracting useful structure from them.
Focused on finance and entrepreneurship.
Focused on robotics and aerodynamics. 4th year research on ornithopter / drone.